






香港大学的化学家唐晋尧(Jinyao Tang)说,最大的挑战是如何引导微型机器到达指定地点。唐晋尧和他的团队已经在这方面取得了进展,他们的微型游泳机器人可以在光的控制下平稳、精准地行进。
这项研究已经发表在了2016年12月的《自然·纳米技术》杂志上。
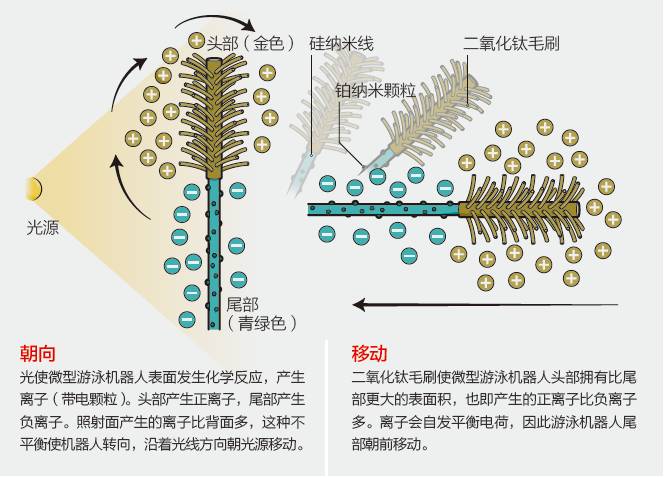
研究人员用硅作“手柄”,二氧化钛作“刷头”,构建了瓶刷形状的微颗粒。这两种材料都会吸收光子,当有光线照射,“手柄”会产生氢氧根负离子,“刷头”则产生氢正离子。离子会自发移动,以平衡电荷,它们带动周围的液体,使微型机器人“手柄”在前,像飞镖那样朝着光源游动。
为了测试性能,研究人员将微型游泳机器人放在载玻片上的液体中,用紫外线引导它拼出“nano”一词。11微米长的机器在2分钟内游完1毫米距离,对医学应用来说,这个速度显然太慢了。但唐晋尧说他们正在改进机器人的形状,以提高泳速。
德国马普智能系统研究所(Max Planck Institute for Intelligent Systems)的纳米机器人学家塞缪尔·桑切斯(Sámuel Sánchez,未参加该研究)评价说:“这种独特的、精确控制速度和方向的方法令人惊叹。”
唐晋尧表示,这项工作是医疗机器人的初级版本,医生可以在体外用聚焦光束沿着病人身体为机器人导航。目前他们用紫外线控制机器人,但同时也在研发可用近红外线控制的微型游泳机器人,这种光线可以穿透厚达几厘米的身体组织。如果要在身体更深处使用,外科医生还可以用光纤控制机器人。
来源:生物谷
推荐阅读: 用玻璃纤维填充树脂有什么好处? / Adv Mater:新型蛛丝绷带可用于外伤口的包扎
扫描下方二维码,关注Medtec China公众号,国际前沿医疗器械设计与制造深度好文一手掌握!



