有源医疗设备展指出,外科手术机器人是一种正在重塑医学实践的变革性技术,而且创新的步伐还在不断加快。虽然外科医生仍然控制着手术过程,但他们从这种辅助中受益匪浅。尽管最近外科手术机器人获得了相当多的关注,但它们实际上已经被医院使用了近20年,并且已经展示了有利的结果。预计在未来五年内,由于认识到这些机器人的优势、全球老龄化人口的医疗需求以及需要利用有限数量外科医生技能的需求,它们的部署和专用系统的推出将大幅增加。
在这一领域内的知识产权空间非常庞大且复杂,包含超过20,000项直接与外科手术机器人相关的专利。如果再加上来自相关领域(如外科导航、图像处理及术前规划软件)的专利,这个数字会更大。为了理解知识产权的空间,重要的是要了解不同参与者进入市场的时间及其关注点、机器人针对不同医疗程序的专业化程度,以及塑造这一复杂领域的创新浪潮。
重要参与者和趋势
有源医疗设备展认为,深入研究知识产权需要洞察那些区分各参与者的使能技术和产品特性,以及推动下一波创新的关键趋势。背景信息如下图所示。需要注意的是,在美国,外科手术机器人要进入手术室必须获得美国食品药品监督管理局(FDA)的批准,而美国目前是最大的市场。FDA的批准包括特定手术系统最早获批的时间线,以及所涵盖的手术应用详情。这些公司通常还会采用严谨的知识产权创造策略。
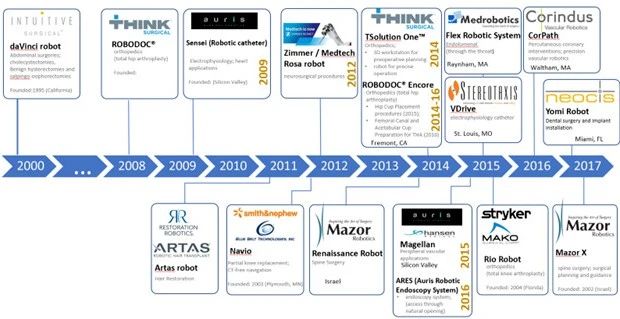
下图突出了这一领域的几个重要方面。直觉外科公司(Intuitive Surgical)在过去的二十多年里一直主导着这个行业,其中一个早期系统在2000年获得了FDA的使用许可。直觉外科的主导地位得到了早期专利的支持,这些专利覆盖了技术的关键方面。到2020年,它的早期专利开始到期,这为许多新进者创造了机会,为了应对即将到来的竞争,直觉外科创建了一个多样化的知识产权组合,截至2023年底,该组合包含了超过3,000项美国专利和待审申请,以及全球范围内超过14,000份文件。
其他早期的参与者还包括:
-
Think Surgical:这是一家专注于提供用于骨科手术的机器人辅助系统的公司。
-
Zimmer/Medtech 的 Rosa Robot:Rosa 是一种主要用于神经外科手术的机器人平台,它也可以用于正骨外科。
-
Medrobotics 的 Encore:Encore 是一种设计用来支持复杂手术程序的机器人系统。
-
Corindus 的 CorPath:这是一种用于冠状动脉介入手术的机器人系统。
-
ARTAS 机器人:这是一种专门设计用于植发手术的机器人系统。
-
Mazor 的 Renaissance:这是另一种用于脊柱和脑部手术的精确导航系统。
-
Stryker/Mako 的 Rio Robot:Rio 是一个模块化的手术平台,主要用于支持关节置换手术。
-
Mazor 的 Mazor X:这是一种集成的手术平台,用于脊柱手术,提供术前规划和术中执行支持。
-
Medtronic 的 Stealth Station Autoguide:这是一个用于神经外科手术中的导航系统。
-
强生(Johnson & Johnson)/Auris 的 Monarch 平台:Monarch 是一个内窥镜系统,用于诊断和治疗肺部疾病。
-
Curexo 的脊柱系统:这是一个用于支持脊柱手术的机器人辅助系统。
有源医疗设备展Medtec现场将设四大专区,囊括电子光学、AI、IVD诊断及影像、检测、临床、法规、研发设计& 大动物实验专区等展品,点击此处报名参展>>>
从2018年至2024年间FDA批准的手术机器人的密集时间线上,可以看出手术机器人技术的快速发展和前景(参见下图)。
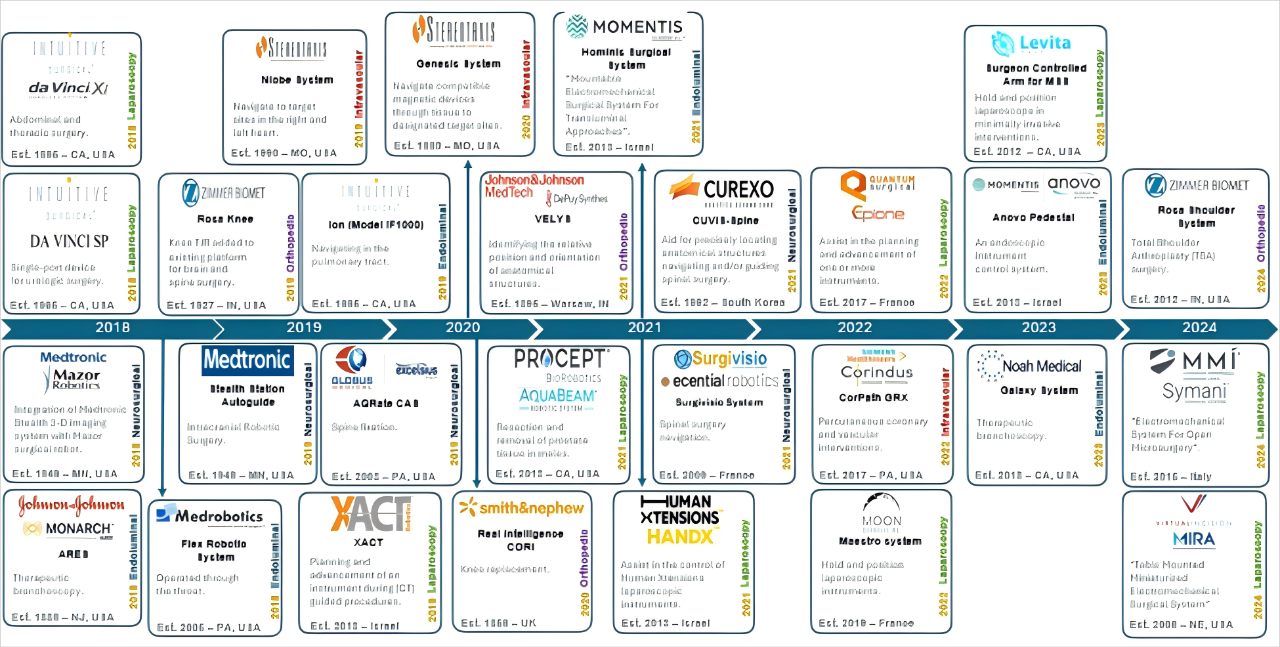
专用手术机器人的激增反映了多种因素推动了创新的加速发展。这些因素包括:电子元件的小型化,在该领域早期专利的到期,相关的进步(例如,手术前计划软件),利用大数据和其他使能技术来实现更优的结果。此外,巨大的市场潜力吸引了多样化的参与者。直观外科公司(Intuitive Surgical)的达芬奇系统在腹腔镜手术(如妇科和前列腺手术)方面的成功,激发了针对其他手术程序的创新,并规避了直观外科的专利和产品主导地位。这一策略已经成为最近获批的多个专用手术机器人成功的秘诀。
手术机器人精度的演变
手术机器人的应用始于创建优化精度的系统;使外科医生能够以更高的精度和灵巧性进行手术,消除任何颤抖,并提供触觉反馈来引导外科医生。
有源医疗设备展指出,多年来,手术机器人还通过利用数据实现了更高的系统精度。收集的数据使得手术前计划更加完善,并在手术过程中做出更为明智的决策,从而改善整体结果。一项关键的使能技术是实时数据,它通过让外科医生辨别其探针接触的组织是否为癌性以及癌性组织的程度,从而改变了手术实践。实时数据的获取使得外科医生能够在最小化对邻近细胞损伤的同时准确地切除癌性肿瘤。
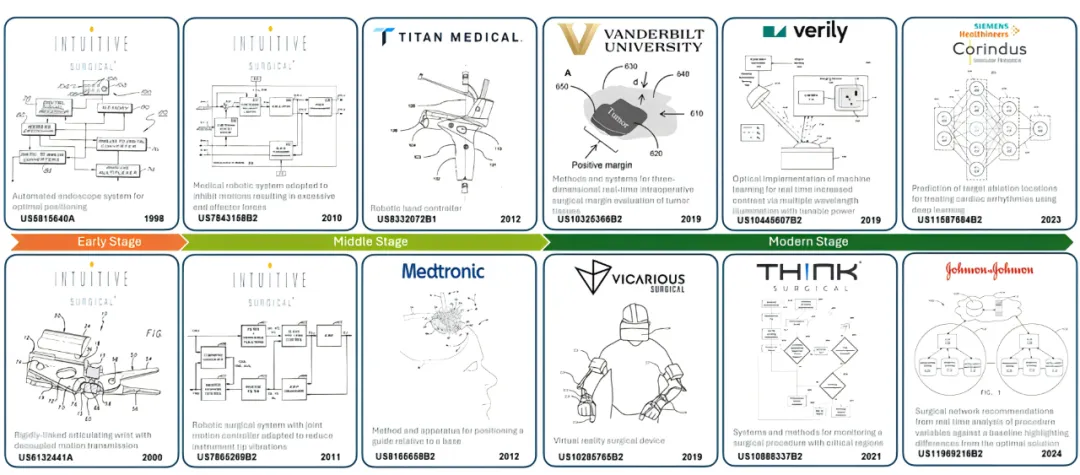
与精度演变相关的创新节奏在下图中有所体现,下图展示了从2000年到2023年提交的一些关键技术专利,技术创新有三个明显的阶段。
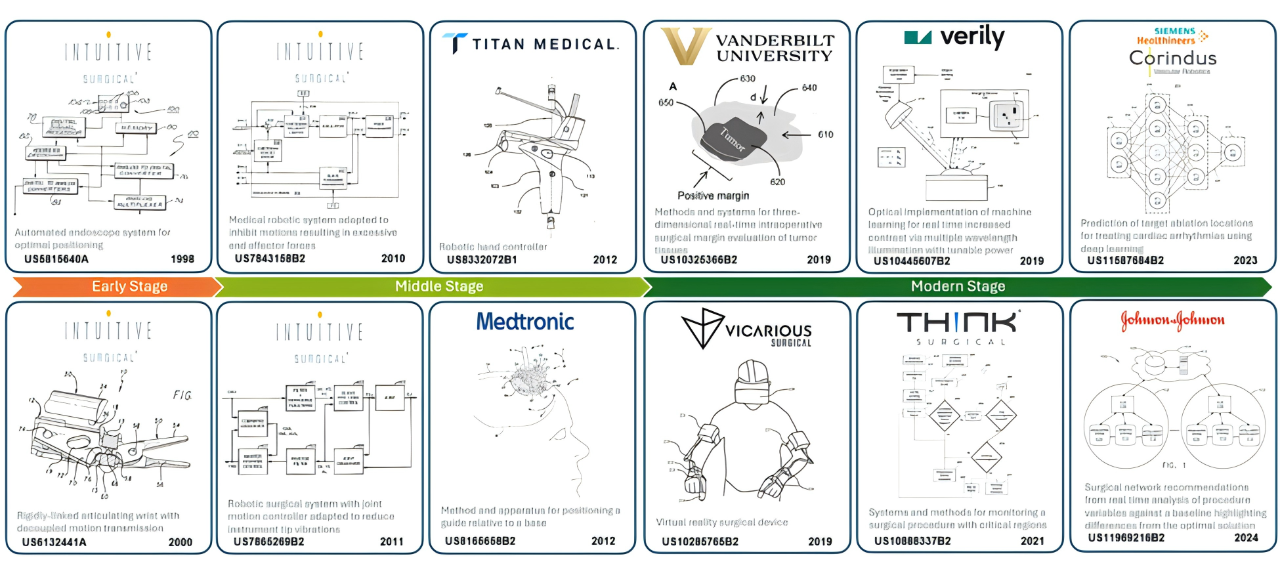
早期阶段(1997年至2002年)这个阶段确保了机器人或设备能够实现关键的手术需求,包括导航(将机器人引导至所需的目的地)。
-
带有屏幕、两个把手和一个脚踏板的用户界面(Computer Motion/Intuitive Surgical, US6244809B1, 2001)。
-
将用户命令转化为器械动作(Computer Motion/Intuitive Surgical, US5815640A, 1998)。
-
具备多种滑轮和缆绳的灵活动腕机制(Intuitive Surgical, US5797900A, 1998)。
-
杆和齿条系统,将杆的线性运动转换为夹爪的旋转运动(Computer Motion/Intuitive Surgical, US6132441A, 2000)。
中期阶段(2007年至2012年)这个阶段创造了一个控制水平和手术现场的意识,超越了外科医生自身的能力。
-
使用力和速度限制抑制造成损害的输入动作(Intuitive Surgical, US7843158B2, 2010)。
-
信号过滤以减少器械尖端的振动(Intuitive Surgical, US7865269B2, 2011)。
-
自动对齐器械以最小化预期方向与实际方向之间的差异(Auris Health, US8317746B2, 2012)。
-
导航系统比较确定的位置与期望的位置,并通知外科医生纠正任何错误(Medtronic, US8165658B2, 2012)。
-
手控制器可以提供力反馈以帮助外科医生理解机械臂的动作(Titan Medical, US8332072B1, 2012)。
现代阶段(2017年至今)
这个阶段正在克服人类表现的局限,旨在通过创建实时的数据丰富的解剖结构和手术过程图像来扩展手术的边界,以优化患者的治疗效果。
-
实时术中评估肿瘤组织边缘(Vanderbilt University, US10325366B2, 2019)。
-
用于实时分类多光谱图像的机器学习算法(Verily, US10445607B2, 2019)。
-
用于心脏消融定位的深度学习算法(Siemens, US11587684B2, 2023)。
-
基于云的分析系统,用于生成术中手术建议(CILAG, US11969216B2, 2024)。
-
自动识别并在内镜图像中标记感兴趣的解剖区域(Cerner Innovation, US9805469B2, 2017)。
-
计算机控制的切割装置,在接近关键区域时提醒外科医生并需要确认后继续操作(THINK Surgical, US10888337B2, 2021)。
-
虚拟现实手术系统,将外科医生带到手术现场(Vicarious Surgical, US10285765B2, 2019)。
进一步的进展预计将显著提高手术效果并加速手术机器人的应用。从专利申请中获得的见解为我们提供了一个独特的窗口,可以看到即将到来的创新加速期及其所提供的机遇,特别是在管理这个不断增长领域周围的知识产权方面。
技术解读篇
外科手术机器人正在重塑医学实践,在上周,我们讨论了外科手术机器人进化中的关键创新和进步。仔细审视这一现代阶段的发展至关重要,因为手术机器人专注于克服人类表现的局限性,通过实时创建解剖结构的数据丰富渲染来扩展手术边界,并执行先进的外科手术以改善患者的结果。
专利申请的洞察提供了一个独特的窗口,让我们能够了解这些突破的方向和关键机会,特别是在管理日益增长的外科手术机器人领域的知识产权方面。
外科手术机器人的获批
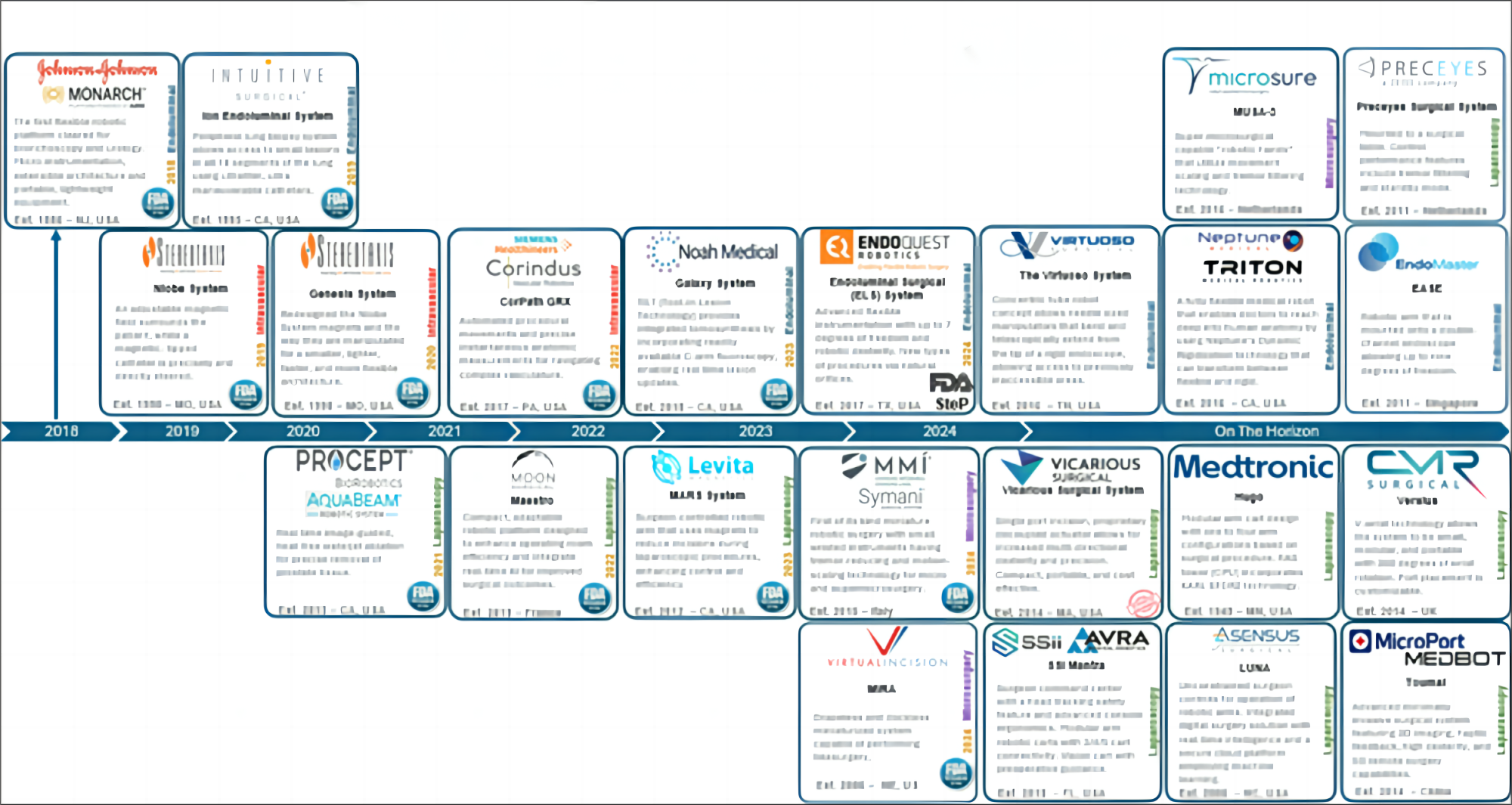
直觉外科手术公司的达芬奇系统的成功,最初专注于腹腔镜手术(妇科和前列腺手术)的腔镜手术机器人刺激了其他外科手术机器人的创新,也正在效仿直觉外科手术公司那样成为细分领域的专利和技术主导地位者。这已成为几个最近获得FDA批准的系统(见下图),以及在欧洲和亚太地区获得批准的系统所采用的成功策略。如:
-
Medtronic的Mazor机器人:专为脊柱手术设计,提高定位精度和减少辐射暴露。
-
Zimmer/Biomet的Rosa机器人:支持膝关节与肩部手术,增强术中导航与精确度。
-
DePuy/Synthes的VELYS-Orthopedics机器人:辅助进行骨科手术,提升置换手术个性化水平。
-
Corindus CorPath GRX血管内介入机器人:实现远程控制下的心血管介入治疗,增加操作安全性。
-
J&J/Auris Monarch system系统:适用于内腔及支气管检查,提供微创诊断与治疗新途径。
-
MMI Symani微手术机器人:专注于精细组织修复,如神经重建等高精度外科操作。
虽然直觉外科手术公司的达芬奇系统仍然是外科手术机器人领域中最知名且最成熟的系统,但在腹腔镜和普通外科手术机器人领域出现了新的参与者,例如:
-
Moon Surgical:专注于开发灵活且易于使用的手术机器人,旨在提高外科手术的可及性和效率。
-
Noah Medical:致力于通过先进的成像和导航技术提供更精确、更安全的介入手术解决方案。
-
CMR Surgical:推出Versius系统,设计紧凑,便于在不同手术室间移动,适用于多种类型的微创手术。
-
Quantum Surgical:专注于肿瘤学领域的创新,其Epione系统用于肝脏肿瘤的微创治疗,提高了精准度。
-
Medtronic’s Hugo:模块化设计的腹腔镜手术平台,旨在为更多医院提供成本效益高的机器人手术选项。
-
J&J’s Ottava:计划中的下一代机器人辅助手术系统,旨在支持多种类型的外科手术,强调易用性和广泛适用性。
新型专业机器人设计的优势包括:
-
更小、更灵活的组件能够到达难以触及的解剖区域;
-
微型化器械用于较小切口,促进术后快速恢复;
-
先进的成像技术和控制台设计以提高外科医生的操作性能;
-
设计并生产出整体尺寸更小的系统。
-
此外,通过增加系统的模块化、便携性、兼容性和通过远程手术实现的远程访问,正在追求降低成本和扩大可用性。
专业外科手术机器人的创新格局不仅限于在美国获得FDA批准,也越来越多地包括来自欧洲和亚太地区的关键参与者,这些地区拥有值得关注的创新和技术专利。
外科手术机器人的特点
难以到达的解剖区域访问 ,新型器械设计用于导航曲折或难以到达的解剖结构。例如,Auris Health的Monarch平台、Neptune Medical的“动态刚性化”技术和Virtuoso Surgical的同心管技术。
微型化设计,这些设计便于特定医疗程序的实施,并减少恢复时间。例如,Microsure MUSA-3和MMI Symani。
控制性能,旨在帮助外科医生的新创新,如成像技术、易用性、触觉反馈和震颤过滤。例如,Corindus血管机器人、Mazor Robotics Mazor X Stealth Edition(被美敦力收购)以及微创医疗机器人Toumai。
便携性和模块化,更小占地面积的手术控制台和视觉系统。这提供了设置手术套件的灵活性(例如,可以连接到手术台上的便携式机械臂)。例如,Human Xtensions HandX、CMR Surgical Versius和Think Surgical TMINI 1.1。
产品专利技术解读
访问难以到达的解剖区域
Monarch平台 —— 由Auris Health自2007年起在美国开发,于2018年3月获得FDA批准,现归强生医疗科技所有。该设备是一种柔性内窥镜机器人,用于支气管镜手术,并结合了机器人技术、微器械、内窥镜和数据科学来辅助肺部疾病的诊断和治疗(US9918681B2)。系统通过基于患者肺部解剖结构的3D模型,增强了外科医生在曲折路径中导航和控制器械的能力。正如专利披露所述,导航系统通过统一医生在医疗器械上的手部动作与解剖图像中显示的器械动作来提高性能。
专注于完全柔性的内窥镜机器人,美国Triton Medical Robotics(Neptune Medical的一个部门)利用了Neptune先前开发的“动态刚性化技术”(WO2019018682A1),该技术用于内窥镜和导管,并将其适应于内窥镜机器人系统(WO2022192515A9)。从专利洞察中可以看出,刚性化装置的新颖之处在于它由多层加固材料组成,在压力或真空作用下可以从柔性转变为刚性。这种状态转换能力使内窥镜能够导航复杂的解剖结构,如肠道和血管。
Virtuoso Surgical起源于美国范德比尔特大学,他们也设计了一种替代标准内窥镜的技术,即同心管技术(US20230134917A1)。专利文献披露了可伸缩的管道,可以像望远镜一样伸展。重要的是,管子操纵器也可以旋转,以确保末端执行器的灵活性,从而执行诸如解剖、夹紧和缝合等任务,同时减小设备的整体尺寸以便进入难以到达的解剖区域。Virtuoso Surgical系统已经为多种疾病条件进行了动物和组织模型手术,例如膀胱癌、子宫肌瘤和良性前列腺增生。
特定医疗程序的微型化设计
Microsure是一家成立于2016年的荷兰大学衍生公司,在2017年通过使用机械手成功治疗淋巴水肿,实现了世界上首次超显微外科干预(EP4265216A1, 2023)。Microsure目前正在开发的MUSA-3手术机器人模型,利用运动缩放和震颤过滤技术将外科医生的手部动作转化为更小、更精确的动作。策略上,MUSA-3允许与其他知名品牌微型仪器无缝集成,并可用于多种程序。
意大利公司MMI Symani于2024年4月获得了FDA de novo分类,并自2019年以来拥有CE标志,表明产品符合欧盟的健康、安全和环境要求。其NanoWrist微型化器械实现了一些最早的机器人进行的重建性肢体显微手术之一(US10864051B2, 2020)。
控制性能
总部位于马萨诸塞州的Corindus Vascular Robotics公司成立于2002年,其Corindus CorPath GRX系统于2016年获得FDA批准。该系统最初被批准用于机器人辅助经皮冠状动脉介入治疗,并于2018年获得了额外的外周血管介入治疗批准。它允许医生以高精度和控制力放置冠状动脉支架,减少辐射暴露并改善结果。相关的专利组合详细描述了基于机器人的导管创新,例如可变驱动力装置和方法(US9750576B2)。Corindus Vascular Robotics及其知识产权于2019年被西门子医疗收购。
同样成立于2002年的Mazor Robotics公司在2018年为其Mazor X Stealth Edition机器人系统获得了FDA批准,该系统用于脊柱手术,并提供术前规划工具和术中指导,使外科医生能够以高精度放置植入物。该系统是少数几个使用AI算法辅助脊柱手术导航的系统之一,如“机器人引导斜向脊柱稳定”专利(US8992580B2)所述。
尽管微创医疗机器人的腹腔镜机器人“图迈”因其AI技术而受到赞誉,但该公司还专注于融合先进的成像模式,如“实时荧光融合技术”(CN218356171U)。根据专利文献,当融合可见光和荧光成像时,该技术通过在目标区域提供多波段检测光来解决图像不清晰的问题,促进可见光和荧光的同时反射。“图迈”于2022年1月在中国获得商业应用批准,并于2024年6月获得CE标志。微创医疗机器人拥有一系列国际专利组合,涵盖了包括内窥镜、骨科、血管通路、自然孔道手术和经皮穿刺在内的多种医疗程序的应用。
北京柏惠维康科技有限公司的Remebot在2018年成为中国首个获得国家药品监督管理局批准的神经外科机器人,并且是中国第一个用于深部脑刺激手术的机器人。专利文献描述了一个早期开发的无框架导航设置,配备有CT/MRI兼容的视觉成像系统,使用AI工具进行图像识别和解剖映射(CN105852970A)。值得注意的是,该公司的专利还涵盖了软组织手术机器人系统和远程手术的特殊功能。
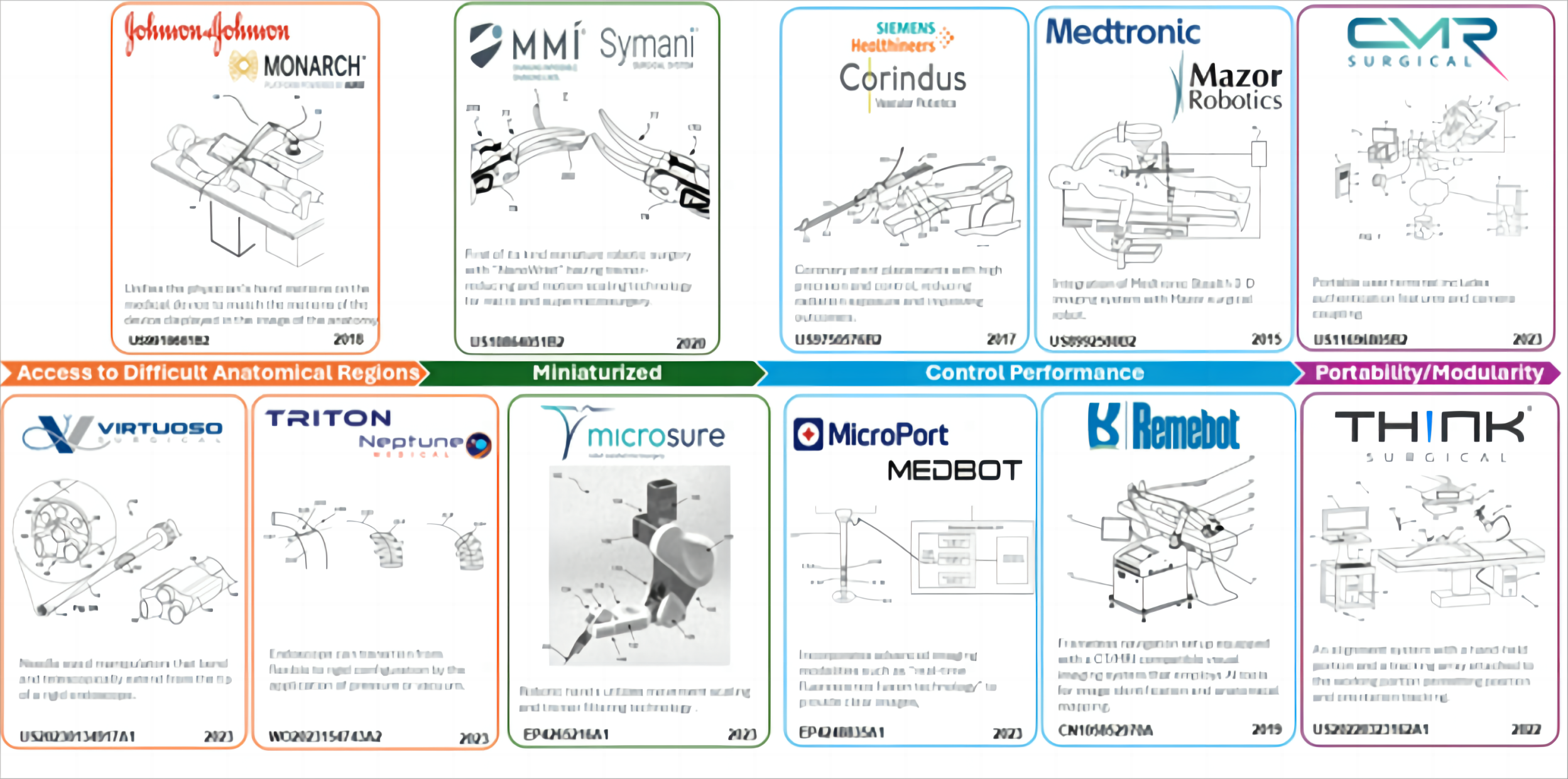
便携性和模块化
虽然微型化对于访问某些解剖结构很重要,但减小整个机器人臂、外科医生操作台和可视化中心的总体尺寸可以增加便携性和灵活性,并显著降低成本。可以连接和拆卸到移动推车或手术台上的机器人臂是一个常见的专业特性。
对于腹腔镜手术,手持式Human Xtensions HandX于2018年获得FDA批准。CMR Surgical的Versius便携系统于2019年获得CE标志。
对于骨科手术,手持式Think Surgical TMINI 1.1于2024年7月获得FDA批准,而Brainlab Cirq则于2020年获得批准。
支持专业外科手术机器人普及的技术正在显著改善手术结果。它们还促进了成本更低的系统,提供了增强的远程手术接入服务,使偏远医院也能受益,并允许更好地处理具有挑战性的医疗程序。
这些机器人通常绕过了早期玩家的大规模专利组合,同时仍然扮演着传统但至关重要的角色,即以高精度进行规划、决策和执行程序。这些专利细节突出了未来的机会,以及在这个复杂领域管理知识产权所需的关键见解。
典型产品-达芬奇手术机器人篇
最初,达芬奇机器人系统是由SRI(一个非营利性研究机构)开发的,后来在1985年得到了美国陆军( DARPA(国防高级研究计划局)的资金支持,目的是在战场前沿附近的高级医疗设施与外科医生相距甚远时,对受伤士兵进行远程手术。
随后,NASA也加入了该项目,进而发展成为一个更加雄心勃勃的计划,即让地球上的外科医生在太空中进行手术。十年后,由于当时的技术条件限制,该计划被认为无法实现而被终止。
曾在该项目工作的斯坦福大学的一批工程师决定创办一家初创公司,将项目方向调整为更现实的目标——实施机器人辅助腹腔镜手术。1995年,直观外科公司成立,并收购了SRI的专利组合。随后,该公司通过实施积极的市场控制策略发展起来,收购了该领域内的其他重要公司,比如Computer Motion。
1999年,达芬奇机器人首次在欧洲上市,并随着时间不断改进:2003年引入了用于持有内窥镜的第四臂。2006年,推出了S版本,提供了真正的三维视野和改善的工作体积。2009年,达芬奇Si版本增加了第二个主控台,允许两名外科医生协同工作。最后,自2014年4月起可用的Xi版本设计更为紧凑,提高了工作体积,并且四臂中的任何一臂都能连接内窥镜相机,还具备了未来与直观外科公司专有的荧光成像系统配合使用的潜力。2024年3月15日,直观外科对外宣布下一代多臂机器人系统达芬奇5获得美国食品药品监督管理局(FDA)510(k)许可。
达芬奇系统的不同版本之间存在一些差异,本文主要以目前国内主流使用和各大国产厂家对标的达芬奇前4代产品为研究对象,笔者通过深入研究达芬奇机器人产品细节和详细检索分析重点专利而对达芬奇手术机器人技术进行细致剖析,形成此文。
系统主要部分
尽管其名称普遍,但实际上达芬奇系统并非传统想象中的那样的机器人,而是一种主从式遥操作器。
本质上,它由三个主要组件组成:一个集成了四条独立臂的从站、一个供主控用的控制台,带有两条可由外科医生流畅操作的独立臂,以及一个包含电源、计算机、3D图像处理器和单极电切电路的控制单元。终端执行器工具安装在四条从臂中的三条上,其中大多数依赖于广泛申请了专利的技术,以Endowrist®品牌进行交易。第二主控控制台作为可选配置(Si®版本),从而允许双外科医生四手操作程序。
下图 达芬奇系统总体结构。从动操作器(1)、主控控制台(2)、控制单元(3)。可选地,第二个主控台(4)允许双外科医生四手操作。

从动设计
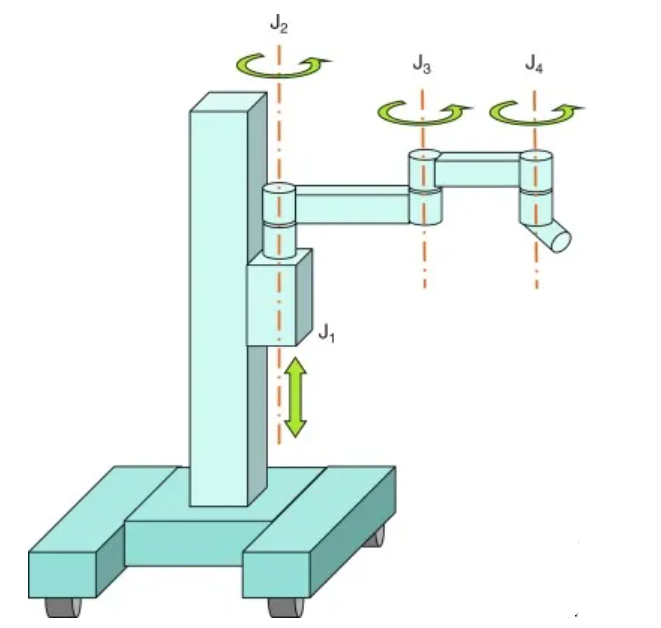
从动部分是一个庞大的结构,由四条臂组成。每条单一臂的运动学主要使用串联连杆,并依赖于远程运动中心(RCM)的概念。一个用于设定每条臂的RCM点的被动近端部分,由四个关节构成。第一个关节是棱柱形的,允许调整高度。随后是三个平面回转关节,属于SCARA类型,便于进行被动操作。棱柱关节采用电动驱动,而其他关节仅包含刹车,并配有一个按钮,在设置过程中释放刹车。
下图展示了达芬奇系统的最初4个自由度(DoF)。电动驱动的棱柱关节J1允许根据患者身高调整臂的高度。关节J2、J3、J4形成一个SCARA被动臂,并配有强力刹车,一旦臂正确就位即可锁定它们。
系统底座庞大且足够重,一旦滚轮刹车接合,整个系统即固定不动,因此无需机械固定在手术台上。系统已实现电动化,以便协助可能没有足够力量来设置系统的护士。
这些臂的结构可以细分为两个子单元:具有3个主动自由度(DoF)的操纵臂和末端执行器工具,根据所使用的工具,该工具还具有3个额外的DoF主动驱动功能以及一个可选的抓握功能。
操纵主动臂是长期研究的结果,结合了串联连杆与平行四边形并联结构,用于RCM。
下图展示了达芬奇系统的主要结构。旋转驱动关节J4、J5共享同一轴Pa,而被动关节J6、J7的旋转复制J5的角运动到工具支架。因此,J5的作用就像位于RCM点一样。J8是一个棱柱关节,确保在RCM点为中心的平移。棱柱关节J8由多个堆叠的滑块通过缆绳和滑轮驱动。最终,达芬奇®系统主体由三个主动关节组成:工具轴向平移以及围绕患者进入点RCM的两个正交旋转。
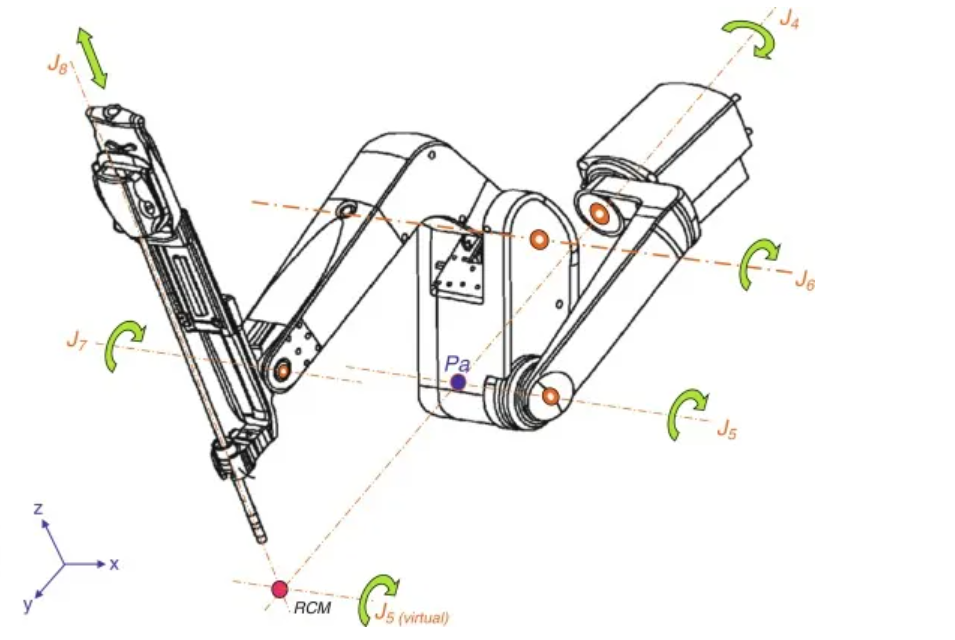
起初,RCM是围绕刚性连杆构建的,但为了使每条臂更轻便、更紧凑,已经发展成由缆绳驱动的远程运动控制。
下图展示了达芬奇系统的RCM机制细节。被动关节J6通过电机驱动关节J5的缆绳(粉色)拉动。进而,J6移动连杆j67并通过缆绳(黄色)将其运动传递给J7滑轮,该滑轮连接到工具支架。这一机制使得J7能够获得与J5相同的角运动量,同时保持驱动器远离患者。整个系统如同一个角度保守的平行四边形(绿色虚线所示)。
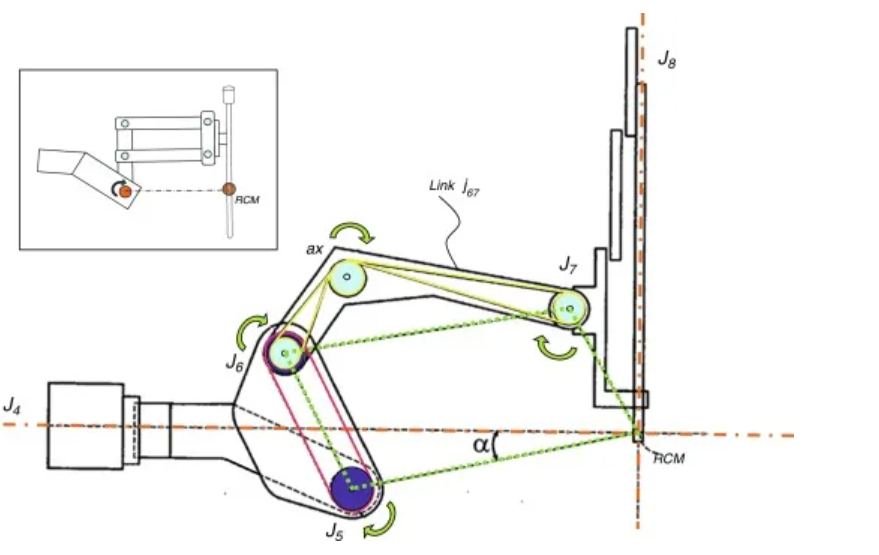
下图展示了达芬奇臂内部的RCM机制。位于柱上的棱镜滑块和臂内的缆绳及滑轮(确保RCM运动)清晰可见。

末端执行器
这些构成了遥操作器系统的末端部分,可能是整个达芬奇系统对手术最富有想象力的贡献。它们也代表了直观外科公司专利组合中最重要的部分,拥有超过200项相关专利。
EndoWrist®包括一系列具有不同机制的器械。我们的目标仅限于对钳子进行运动学分析,这是机械上最复杂且在经口机器人手术中最重要的一项。

EndoWrist®钳子设计用于让运动系统在体内工作。这个巧妙而又复杂的概念提供了传统器械无法达到的非凡灵活性。三个自由度加上钳子开合动作,均由腱索驱动机构操作。
EndoWrist®器械有8mm和5mm输出直径两种规格,总长度为57cm,可用长度可达38cm。8mm的器械配备有万向节,而5mm的则具有更复杂的关节结构,由四个串联关节组成。
下图展示了EndoWrist®器械的内部设计。5mm的器械由于口咽腔空间有限,因此在经口机器人手术中最为常用。
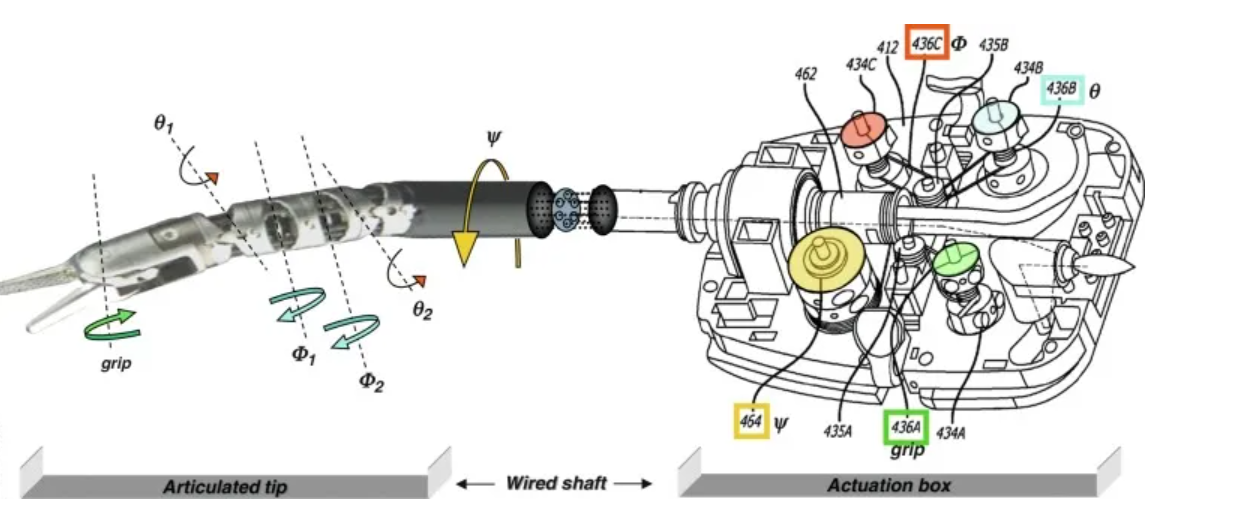
这四个“脊椎”关节尖端结构允许减小关节直径,代价是增加了长度:头尾向Φ和平行侧向θ旋转各自解耦为两个交替旋转阶段,分别为Φ1、θ1、Φ2、θ2。缆绳和滑轮被用来控制关节角度和抓取功能(钳子开合)。系统采用主动肌-拮抗肌配对控制方案,因此每个自由度需要两根驱动缆绳。因此,为了驱动头尾向和平行侧向旋转及钳子,总共需要6根缆绳。这些缆绳的路径在器械轴内,设有间隔器以避免缆绳冲突和由此产生的摩擦。第四个自由度是轴向旋转Ψ,直接在驱动盒内部操作。四个卷筒各自对应一个自由度,而张紧滑轮确保缆绳张力恒定,否则会因环境温度、磨损和重复灭菌而降低。
每个卷筒本身在EndoWrist®器械固定到操纵臂时,机械连接到旋转鼓。另一组缆绳为这些鼓提供运动,从而驱动钳子的4个自由度。
从运动学上看,这种配置属于串联类型,允许在非常有限的末端执行器占用空间下进行大范围的运动。钳子的全角度Φ和θ为±90°,而Ψ允许全360°轴向旋转,提供了非常舒适的可达性。负载能力大致相当于开放手术中常见的水平,尽管关于这一点没有准确的信息。
5mm关节器械的缺点在于其双平面脊椎连续关节的曲率半径较大,因此比万向节8mm器械需要更多空间来使其弯曲。
鉴于其复杂且因此成本高昂的制造过程以及EndoWrist®架构的相对脆弱性,制造商在这些矛盾要求之间做出了妥协。系统销售时指定使用5次或10次具体次数取决于器械后废弃。这在医疗器械史上引入了一个新概念:中等消耗品器械。控制盒中内置了一个带有热敏电阻的电子芯片,记录每次灭菌,然后破坏识别码,迫使用户在达到最大循环次数后丢弃器械。
内窥镜
这些由两个霍普金斯类型的内窥镜并排组成,带有光源通道集成在一个管内。每个内窥镜与另一个相距6mm,以满足立体视觉所需的真正视网膜差异。有两种外径可供选择:8.5mm和12mm。通常只有第一种类型用于耳鼻喉-头颈外科手术。
下图展示了达芬奇立体内窥镜。

结语
有源医疗设备展Medtec现场将设四大专区,囊括电子光学、AI、IVD诊断及影像、检测、临床、法规、研发设计& 大动物实验专区等展品,点击此处报名参展>>>
随着手术机器人技术领域的竞争日益加剧,专利事务已经成为企业不可或缺的一部分。做好自身的专利布局,不仅可以保护企业的创新成果,还可以为企业在市场竞争中提供有力的法律支持。
首先,企业需要注重专利的申请和保护。在研发过程中,一旦有新的技术突破或创新点,就应及时申请专利,确保自身的技术成果得到法律保护。同时,企业还需要对已有的专利进行定期维护和管理,确保其有效性和稳定性。
其次,企业需要建立完善的专利预警机制。通过定期检索和分析相关领域的专利信息,企业可以及时了解技术发展趋势和竞争对手的动态,从而避免可能的专利侵权风险。一旦发现存在侵权风险,企业应迅速采取措施进行应对,如寻求专利许可、进行技术改进或调整市场策略等。
此外,企业还需要做好应对专利战的准备。在竞争激烈的市场环境中,专利战可能随时爆发。因此,企业需要提前制定应对策略,如建立专门的法务团队、储备充足的资金用于可能的专利诉讼等。同时,企业还可以通过与合作伙伴建立专利联盟、参与行业标准制定等方式来增强自身的专利实力和市场影响力。
在手术机器人这一赛道上,专利事务的复杂性和专业性要求极高,因此,寻找专注、高水平且聚焦此领域的专业人士和团队显得尤为重要。这样的团队不仅具备深厚的法律和技术背景,还能准确理解并把握手术机器人技术的核心要点和市场动态。他们的专业知识和经验将为企业带来准确、高效、高质且低成本的专利事务服务,助力企业在激烈的市场竞争中脱颖而出。
文章来源: 医械知识产权