图片源自网络(如有侵权请联系删除)下同
1 经支气管镜活检
早筛早诊:研究表明,对高风险群体进行低剂量螺旋CT(LDCT)肺癌筛查可有效降低肺癌死亡率。早期发现和及时诊断I期非小细胞肺癌,2024上海高端医疗设备展Medtec认为,经过手术及术后的综合治疗,能够有非常好的治疗效果,原位癌的患者5年存活率能达到100%。
活检手段:经胸壁穿刺活检(TTNB)和经支气管活检(TBLB),各有优势,不能相互完全取代。CT引导下的TTNB的诊断率高达90%,但是并发症包括气胸、血胸、咯血、空气栓塞等发生率较高,尤其是对于有显著肺气肿、肺大泡、邻近病变的肺血管和中央病变的患者,是不适用的。TBLB不会破坏正常的胸膜和肺组织、安全性较高,但是传统支气管镜检查活检对小结节病变的敏感性较低,对于位于肺部外三分之一区域的病变,尤其是小于2cm的结节,诊断率大约在18-62%之间。
r-EBUS-TBLB:使用旋转的超声微型探头在活检前可对病变位置进行确认,探头可产生环形超声图像,插入到目标位置直到信号显示周围病变,同心视图表明探头被病变包围,而偏心视图表明探头与病变相邻。但由于r-EBUS很难被引导到气道以外的地方,其用途在技术上受到限制。
VBN:使用虚拟支气管镜图像在支气管路线上将支气管镜引导到周围病变的方法。一般只具备规划导航路径的功能,用于辅助术者在虚拟导航系统生成的气道内图像和导航路径下,更高效的选择正确的支气管分支抵达目标病灶,通常用于辅助细镜/超细镜、r-EBUS操作。
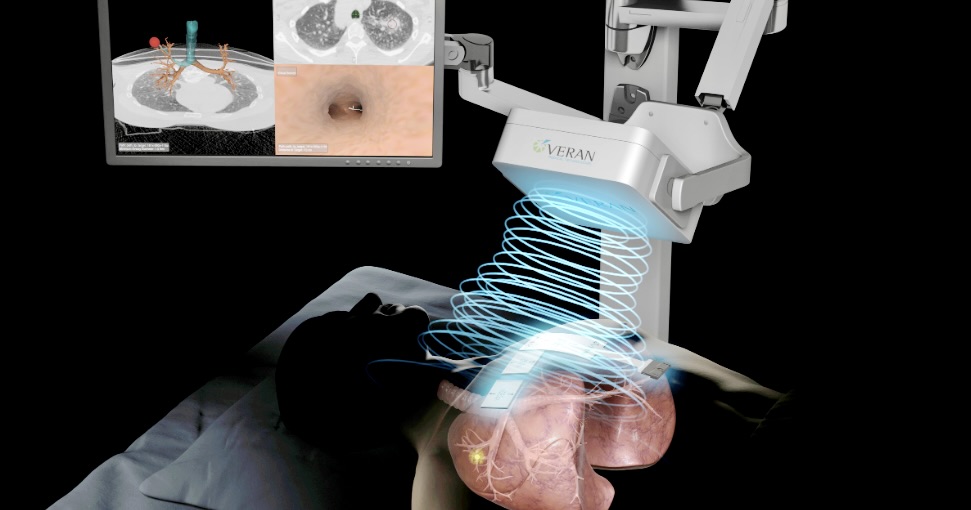
ENB:电磁(EM)导航使用放置在患者附近的EM场发生器,生成围绕目标解剖结构的局部均匀电磁场,支气管镜、导管、或活检工具头端中的电磁传感器线圈感应磁场产生位置信号得以形成定位数据,从而获得覆盖在虚拟支气管镜地图上的位置,为支气管镜检查期间提供动态跟踪的指导。
ENB和VBN作为导航支气管镜的主要技术之一,近年来在PPLs的临床诊断中得到了广泛应用,ENB代表产品有Veran SPiN™、superDimension™等,VBN代表产品有Archimedes™、LungPro™、Bf-NAVI™、DirectPath™等。
目前有较多的研究报告了使用SuperDimension™导航系统的ENB数据,而关于在亚洲人群中使用Veran导航系统的数据有限。
2 ENB和VBN工作程序
■ Veran ENB程序
术前CT扫描:在ENB手术当天,对患者进行了双相(吸气和呼气)1mm层厚的CT扫描检查,用于创建更接近生理肺体积的术前虚拟图。
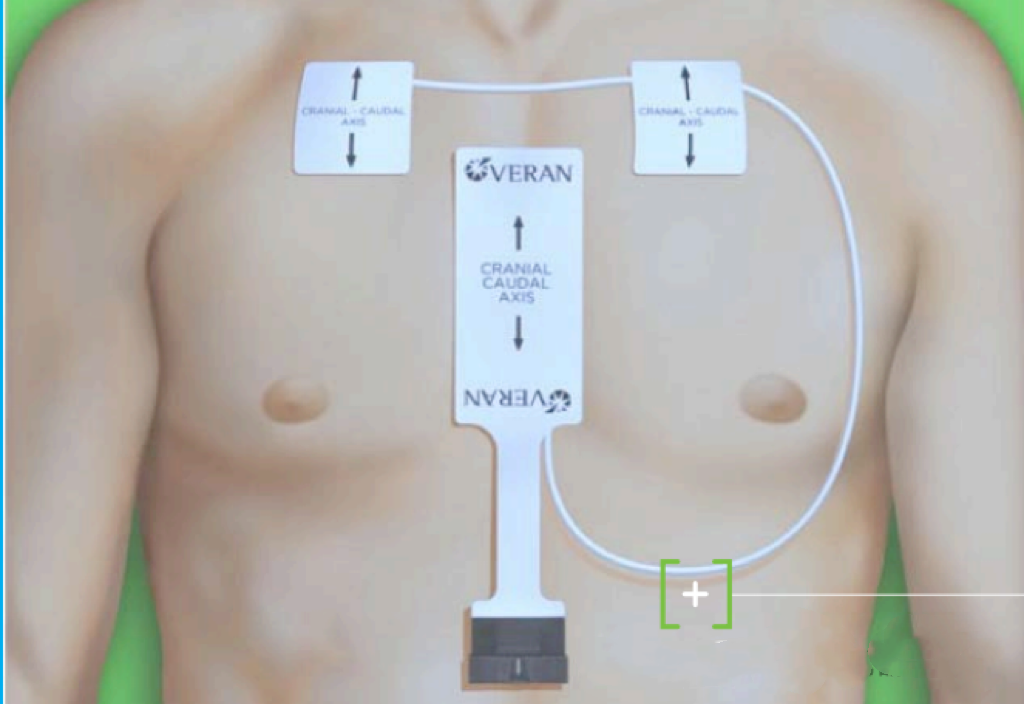
在CT扫描前,需要在患者前胸放置导航跟踪垫(vPad2患者追踪器,INS-0050),可以在整个过程中实现自动注册、指导导航和跟踪患者呼吸状态。
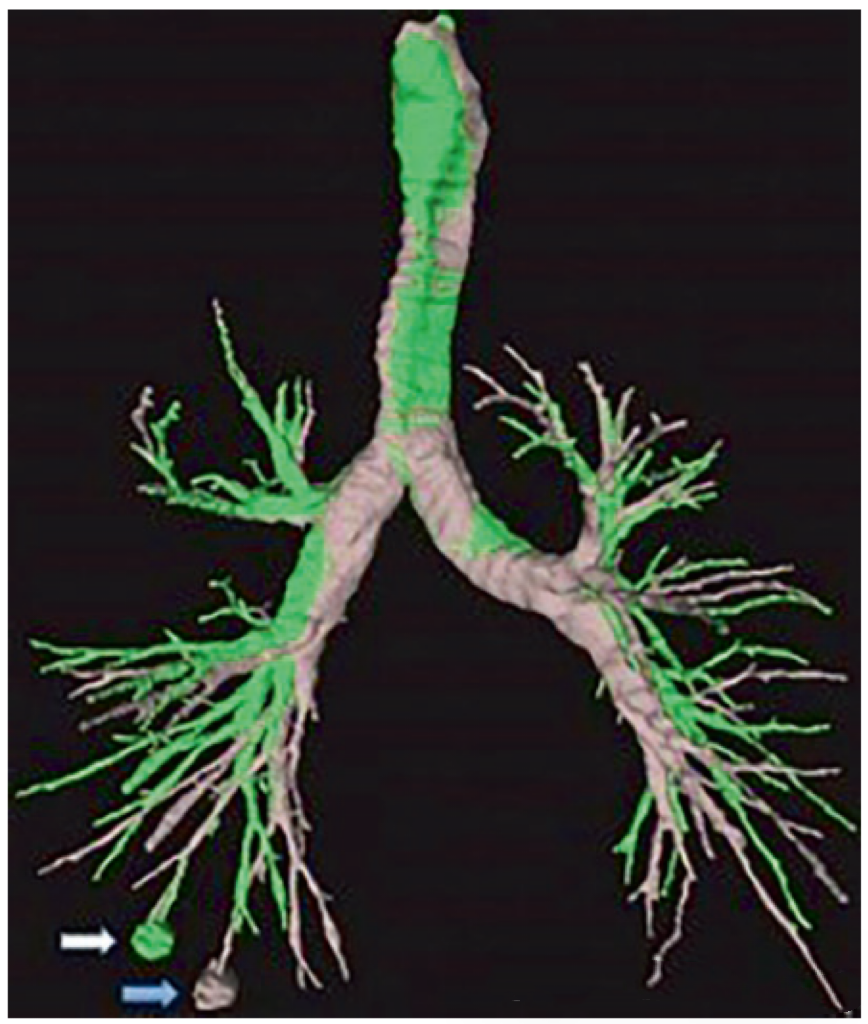
术前计划:在确定目标病变后,创建通往肺病变的规划路线。
2024上海高端医疗设备展Medtec同期推出ADTE 高端有源医疗装备技术展汇集国内外高端医疗器械生产厂商,助力中国高端医疗器械国产化。此外,现场还将举办有源医疗设备核心部件与技术论坛,议题涵盖物联大趋势下传感器如何助力前端数据采集、探测器在有源设备中的应用及发展、特殊材料在有源部件上的使用等。现在注册参观即可免费参会>>>
活检:使用针吸工具(Always-On Tip Tracked 21ga ANSO Cytology Needle ),导航至目标病变进行组织取样。
■ Archimedes VBN程序
术前CT扫描:在VBN手术当天,对患者进行1mm层厚的CT扫描检查,用于创建3D虚拟气道图。
术前计划:Archimedes可以显示不同的路径,术者根据CT扫描图像分析和手绘导航路径检查和调整VBN系统自动形成的导航路径,在选择活检部位后,评估病变与周围血管之间的关系,确定避开血管的最佳路径,并测量病变到胸膜的距离。
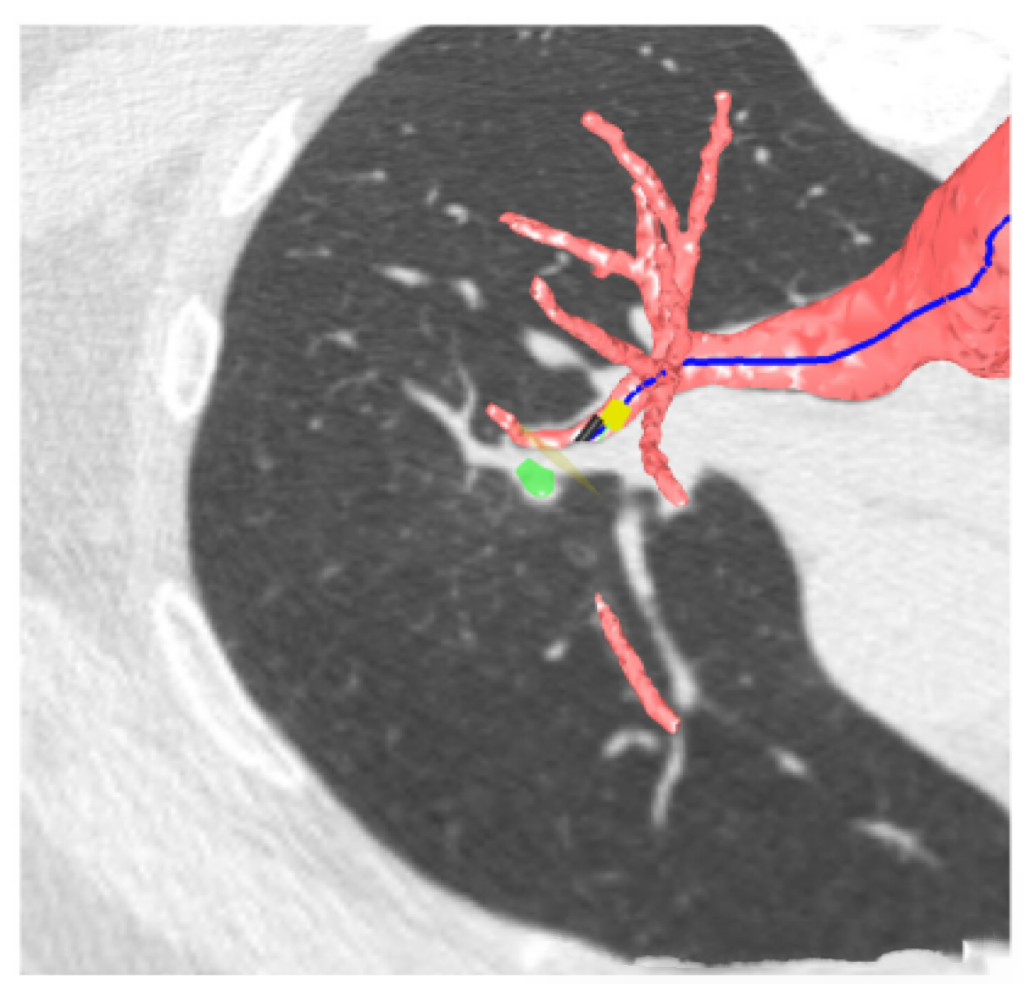
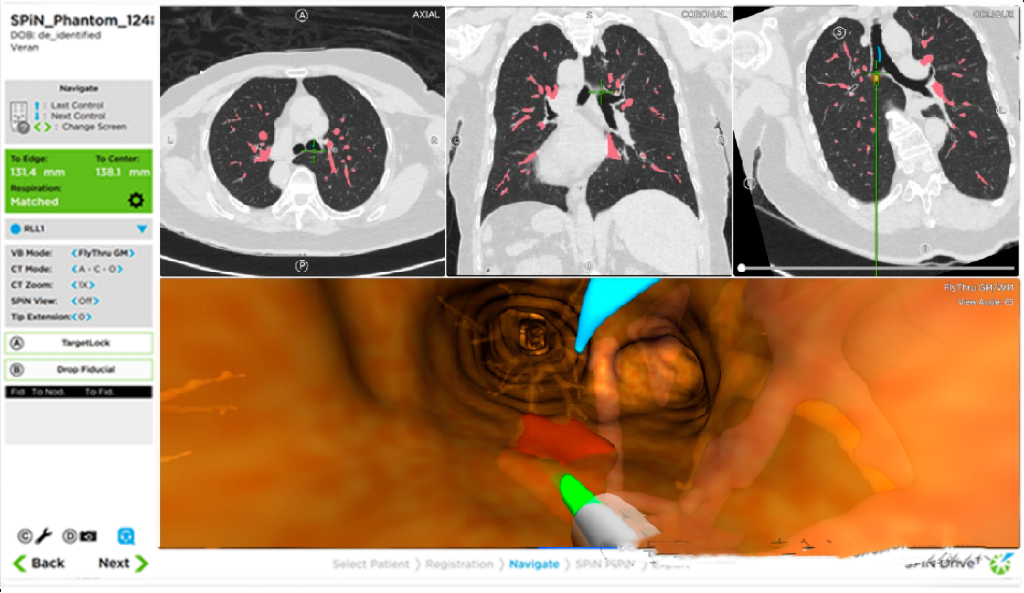
术中导航:患者被置于仰卧位并进行全身麻醉,电子引导路径和气道数据被叠加到实时内窥镜图像上,以引导内窥镜到达目标病变,使用支气管镜导航,沿着选定的路径到目标病变,在没有支气管征的情况下,则到达入口点(POE)处。
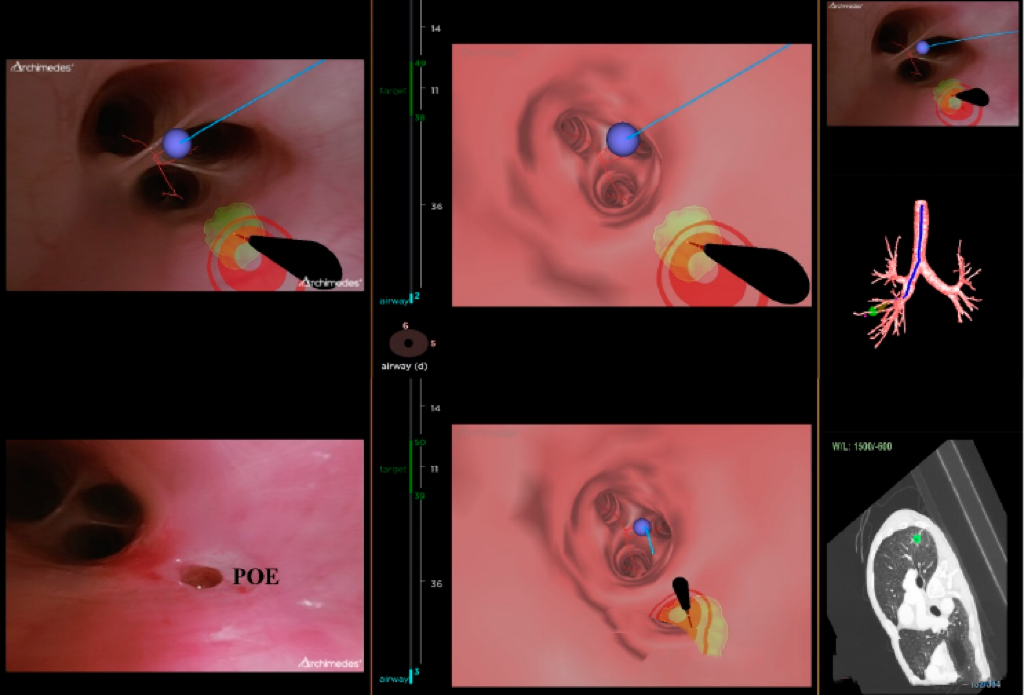
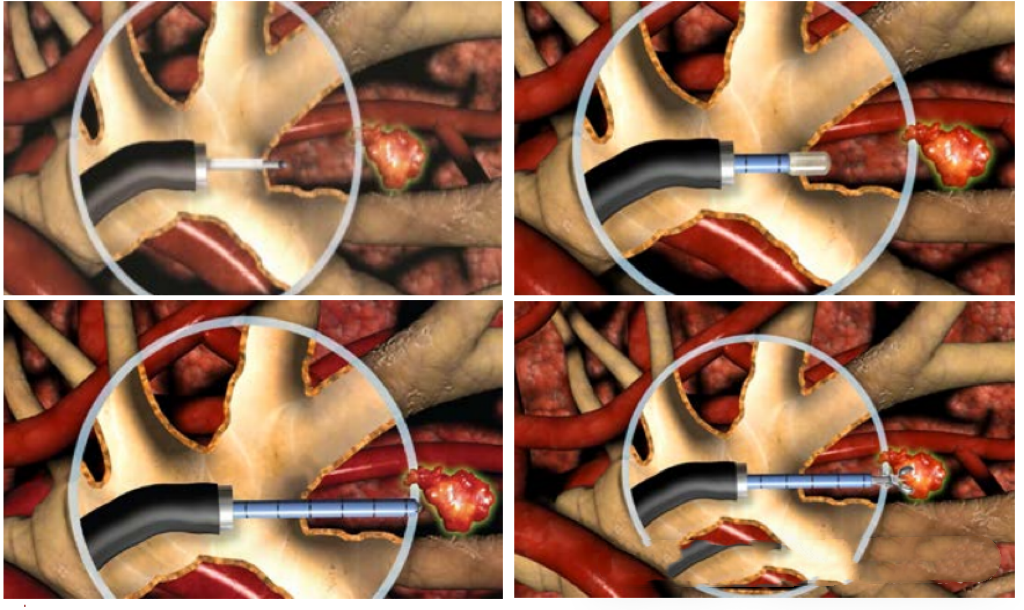
活检:通过支气管镜工作通道使用外径2.0mm活检钳进行取样,在没有支气管征的情况下,创建BTPNA入路,使用18号针头穿刺气道壁,同步扩张球囊扩张穿刺口,送入鞘管,建立隧道,然后退出穿刺针级扩张球囊,保留鞘管,送入活检工具获取组织样本。
3 ENB和VBN的对照研究
关于研究:对照研究数据来自2019年11月至2022年11月期间,宝岛台湾省的“三军”总医院胸外科,有连续35名因不适合TTNB的肺部病变患者接受导航支气管镜检查的情况。纳入标准包括年龄≥18岁,肺部病变来源不明,经过多学科评估后未能对肿瘤组织进行病理学诊断,以及患者及其家庭愿意接受新型导航支气管镜检查。排除标准包括不能耐受全身麻醉,存在凝血病,长期使用抗凝药物,血小板计数和功能异常,有气道出血史,以及医疗记录不完整。35名患者中的19名患者接受了ENB活检,另外16名接受了VBN。
关于医生:据2024上海高端医疗设备展Medtec了解,ENB程序和VBN程序分别由两位一位胸外科医生执行,胸外科医生均具有五年以上支气管镜手术经验,且每年至少操作100例手术。
对ENB和VBN程序中的病理活检标本进行了评估。在手术期间和手术后,记录了并发症和管理的数据。所有患者在术后2小时内接受了术后胸部影像检查,以评估可能的术后并发症,术后期间无事件。
统计分析:分类变量通过计数和百分比进行总结。连续变量通过平均值、标准差、中位数、最小值和最大值进行总结。使用Pearson卡方检验或Fisher精确检验比较分类变量。对于连续变量的比较,则使用Student’s t检验。在单变量分析中显著的变量和那些被认为在临床上具有重要因素的变量被包括在逻辑回归分析中。所有计算均使用统计产品与服务解决方案(版本22,SPSS公司,美国伊利诺伊州芝加哥)进行,并且认为p值小于0.05具有统计学意义。
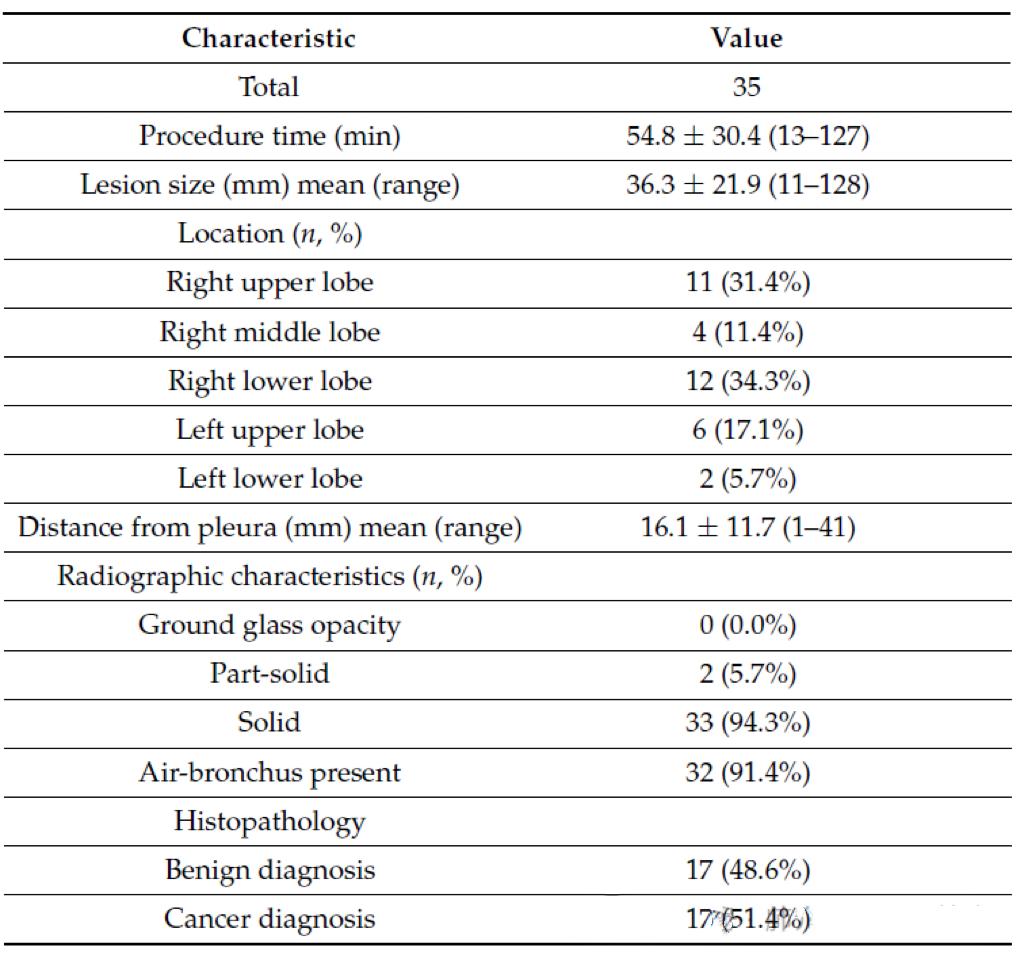
患者数据:研究人群的平均年龄是67.6岁(范围:48-85岁)。在这些患者中,有13人(37.1%)有吸烟史。整个手术的平均时间是54.8 ± 30.7min。19名(54.3%)患者接受了Veran ENB,另外16名(45.7%)接受了Archimedes VBN。
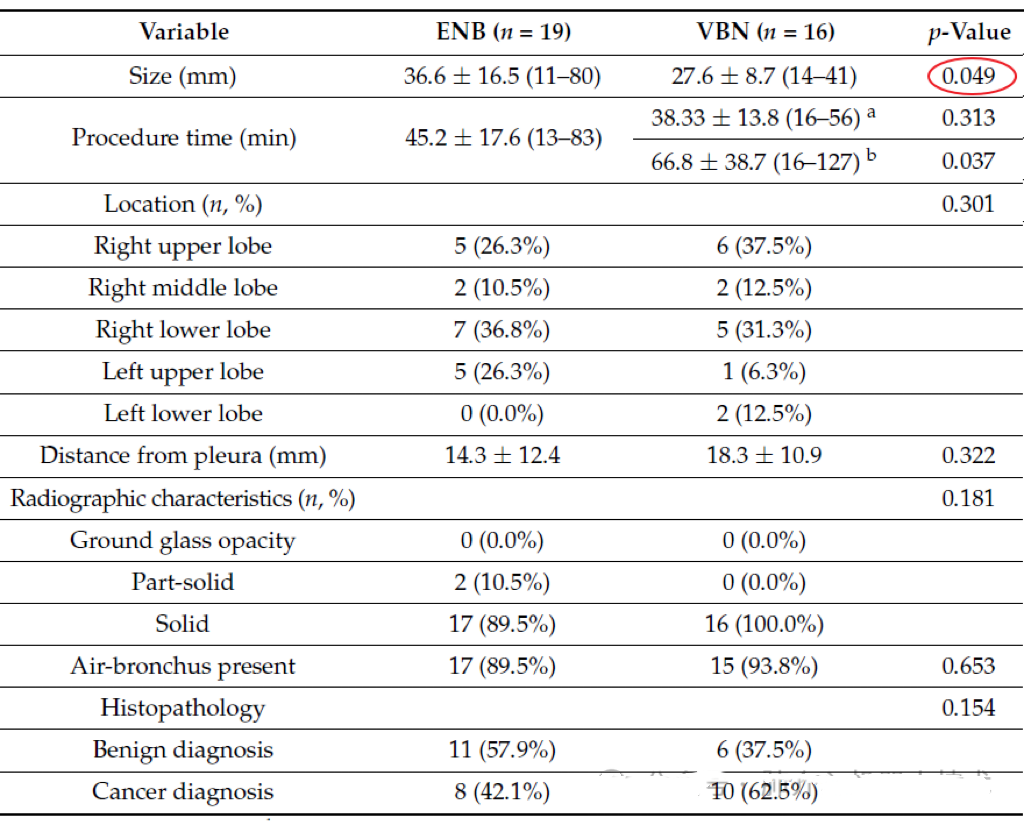
病变数据:肺部病变的平均大小为36.3 ± 21.9mm,病变到胸膜表面在其最短路径上的平均距离为16.1 ± 11.7mm。肿瘤主要集中在右下叶(12例,34.3%),大多数肿瘤是实性(33例,94.3%)。此外,这组肿瘤中大多数肿瘤的气道征呈阳性(32例,91.4%)。最终组织病理学结果大多数显示为恶性(18例,51.4%)。在导航支气管镜引导的活检期间没有发生气胸、出血或气管损伤。没有记录到与手术相关的死亡。
4 对照研究结果
研究结果:两组的患者特征方面没有差异。在放射学特征方面,Veran ENB与Archimedes VBN相比,主要用于较大的肺部病变(p=0.049)。对于经支气管导航,Veran ENB所需手术时间比Archimedes VBN长,但差异不显著(p=0.313)。Archimedes VBN结合BTPNA需要更长的手术时间(p=0.037)。在肿瘤位置(p=0.301)、距胸膜的距离(p=0.322)、实性结节存在(p=0.181)和气道征(p=0.653)方面,两组之间没有显著差异。通过组织病理学确认的恶性肿瘤在Archimedes VBN组中占主导地位(n = 10, 62.5%)。
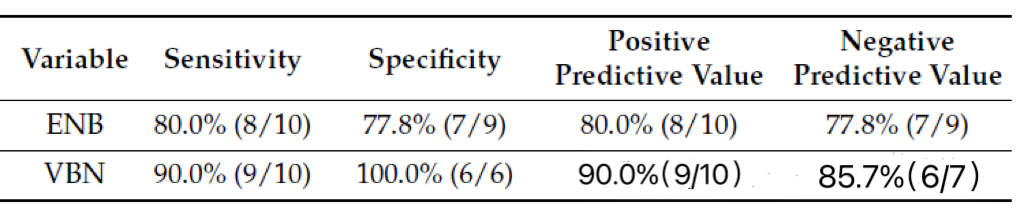
诊断率:Veran ENB在CT成像上有支气管征的患者中的诊断率为89.5%(17/19),而Archimedes VBN的诊断率为93.8%(15/16)。敏感性、特异性、阳性预测值、阴性预测值如表所列。对于较小的肺部病变,Archimedes VBN与ENB相比有提高的成功率(93.8%对比78.9%)。
5 研究讨论
关于成功率:在当前研究中,VBN与ENB相比,对较小病变具有较高的成功率。使用ENB或VBN活检的病变大小有显著差异:分别为36.6 ± 16.5 mm(11–80 mm)和27.6 ± 8.7 mm(14–41 mm),(p=0.049)。ENB组中肺部病变较大可能是由于操作者经验的差异,因为较大的病变更容易定位并获得标本。两组之间的差异可能的一个解释是ENB组缺乏透视的实时定位。而使用术中CT可以提高支气管镜技术诊断肺部病变的诊断率已被多个临床研究所证实,以及CT增强透视可以提供完整的跟踪,这有助于操作者在导航支气管镜手术过程中识别其他不可见的病变。对于磨玻璃病变(GGO)或小病灶在透视下不易被发现的情况,可通过CBCT数据上的标记病灶提供完整的跟踪。
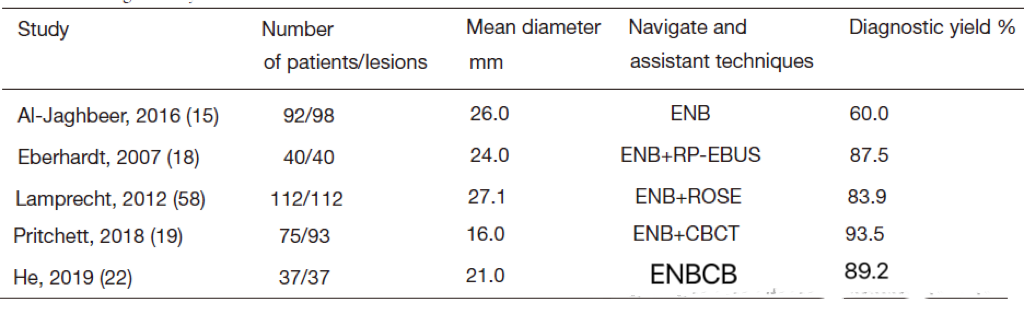
根据病变的位置、大小、以及支气管征,选择使用单一或组合方法对诊断率的影响是明显的,从60 %到89 %不等。
关于适应症:本研究的病变距离胸膜的范围是1~41mm,对距离胸壁仅几毫米的肺部肿块进行经皮穿刺活检在技术上可能具有挑战性,并发症风险会显著增加,如气胸或出血。此外,对于年老体弱的患者,由于各种原因不能适当定位,以及在同侧依赖位置和肋骨拥挤的情况下被判定无法进入病灶的患者,相比经皮穿刺活检,经支气管镜活检侵入性更小、更易被患者接受。
关于研究结果的差异:此项研究中Veran ENB的相对较低的成功率表明了术前CT扫描和重建气道解剖结构的注册算法的质量存在一些问题。在另一项ENB和VBN的对比研究中,发现有无支气管征,ENB均优于VBN,有阳性支气管征( p = 0.0283)时,ENB的成功率为81.0 % ( 47 / 58 ),VBN为60.0 % ( 21 / 35 );无阳性支气管征( p = 0.0431)时,ENB成功率为为40.5 % ( 17 / 42 ),VBN为13.3 % ( 2 / 15 )。在一项104名患者的前瞻性、多中心研究使用Archimedes引导支气管镜透明膜结节入路(BTPNA)和引导经支气管针吸的研究显示,综合使用血管标测、融合荧光镜透视、实时支气管镜检查和虚拟支气管镜导航,可达到90.2%的采样率和86.3%的活检率,BTPNA和引导式经支气管针吸的采样率均为93.9%。
实时成像使操作者能够通过Archimedes VBN路线和目标病变之间的相关性立即意识到支气管通路和方向。准确的气道分割和安全的POE对于减少操作者术前气道识别的负担和避免可能的并发症以实现成功诊断至关重要。
研究的局限性:首先这是一项由胸外科医生进行的回顾性单一机构研究。ENB或VBN引导活检的选择标准可能会因外科医生的经验、临床环境和患者的个体病史和状况而有所不同。大多数患者由于目标肺部病变附近存在血管结构而无法接受ENB。使用ENB或VBN引导活检的决定是在多学科团队会议上基于病例审查和讨论做出的。因此,选择偏差可能会影响研究的有效性。第二,研究样本量很小,一些临床信息,如活检持续时间和每个程序中使用的活检数量,在病历审查中没有提及。第三,有两名操作者执行了ENB程序,而只有一名操作者执行了VBN,这可能会妨碍结果的普遍性,有可能经验丰富的外科医生在这项研究中引入了偏差。
研究的结论:导航支气管镜技术在评估肺部病变方面是安全且优越的。研究表明,在胸外科部门中Archimedes VBN导航系统是ENB的可行替代方案,并且无论是否存在支气管征,通过应用CBCT会增加导航成功率。
参考原文:
[1] Tsai Y M, Kuo Y S, Lin K H, et al. Diagnostic performance of electromagnetic navigation versus virtual navigation bronchoscopy-guided biopsy for pulmonary lesions in a single institution: potential role of artificial intelligence for navigation planning[J]. Diagnostics, 2023, 13(6): 1124.
[2] Yutaka Y, Sato T, Isowa M, et al. Electromagnetic navigation bronchoscopy versus virtual bronchoscopy navigation for improving the diagnosis of peripheral lung lesions: analysis of the predictors of successful diagnosis[J]. Surgery Today, 2022: 1-8.
文章来源:肺介入机器人技术