






发展现状
进入21世纪以来,随着材料性能的提升以及密封技术的发展,人工肌肉在软体机器人中的应用取得突破性进展。目前已经开发出各种不同流体驱动的肌肉致动器。
根据设计和操作可分类为:(1)气动或液压操作;(2)高压或真空操作;(3)编织/网状或嵌入式膜;(4)拉伸膜或重排膜。
制动器的关键特征是膨胀和变形,基本原理是当致动器充气膨胀之后,通过承载元件传递力,从而实现特定的动作。基于气动人工肌肉的原理,研究人员已经发明出许多新颖的执行器和机器人。
对软体机器人而言,在特定的位置进行指定的弯曲是一个技术难点。2012年,S.Voisembert等人通过对航天服关节膨胀的研究,提出一种新的充气机器人概念。该设计基于强力的编织物和封闭的气室构成,由腱和滑轮执行所需的弯曲运动。其主要设定是能够在不改变体积的情况下改变“关节”形状。通过有限元分析可以看出该模型可以经受大的弯曲并且仍然携带有小的偏转的有效载荷,具有良好的机械性能,适用于长距离操纵的机器人。
灵巧的操纵器实现可靠的抓握更是软体机器人研究的重点难题之一。2013年,Robert F. Shepherd提出一种褶皱的PAM,通过将三个周向间隔120°的致动器粘合在一起构成一个夹持器,该夹持器能够分别从瓶内和瓶外抓起壁面光滑的酒杯。2016年,Raphael Deimel设计了一个新颖的拟人手,能够更灵巧地进行抓握。基于反馈控制的方式促进了机器手与环境之间的交互,提升了软体机器人的抓握性能。该项目采用医疗领域的Kapandji测试来测试拟人手的灵巧度,实验表明,该拟人手能通过大多数的测试项目,并能实现绝大多数特定抓握类型的实验操作。这种机器拟人手的建立在很大程度上降低了对于机器手抓取和操纵研究的门槛。
软体机器人要实现精确的反馈控制除了要有一套合理的控制算法外,传感器的合理选用、布置也是其技术核心。Aidan Leitch设计了一个气动变形传感器,该传感器由气囊、管路以及一块集成电路板组成。当气囊发生拉伸、压缩、弯曲、扭转时,其内部的空气压力也发生相应的变化,通过压力传感器和微控制器读取压力变化,从而借助相应的算法实现软体机器人简单的反馈控制。与上述不同,Huichan Zhao在软体假手中使用可伸缩光波导进行应变感应,具有高精度和低滞后的特性。该设计将光子应变传感器嵌入致动器膜中,在每个手指中并入三个这样的LED灯和传感器,分别分布在三个轴向平面上,通过三个波导的隔离控制,利用形变量的改变,感应内部气体压力和外部负载施加的力。基于该传感器集成的软体假手能够检测物体的形状和纹理,探测其柔软度并对其进行区分、识别。
医疗康复领域的应用
软体机器人在材料、控制以及感应等方面的发展掀起了其在医疗康复领域应用的热潮,通过不断引用新技术,软体机器人已成为热门的医疗康复设备,占据的市场份额逐年提升,展现出良好发展态势。以康复手套和辅助行走装置为代表的软体机器人已经发展到了一定的成熟阶段,此外基于其独特的柔软性,软体机器人也用于模拟机体运动,为实现医疗领域的突破提供新思路。
手部康复手套
因为各种事故导致手功能有缺陷的人需要进行长时间的手部康复训练,为方便人们足不出户进行这样的训练,哈佛大学的Conor J. Walsh在2013年提出了一种可以实现弯曲运动的气动康复手套。该手套基于PneuNets架构,由硅橡胶为主体材料制成,在制造时将一张纸嵌入两弹性层之间,作为致动器的不可延伸层,限制了其在主轴方向的延展,如图1所示。
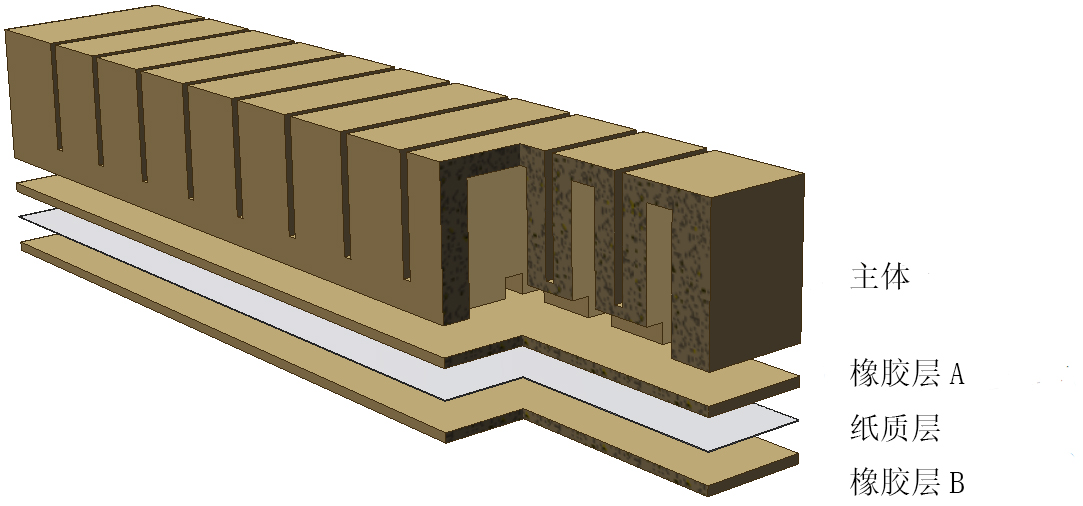
图1 “PneuNets”致动器设计图
用魔术贴将致动器分别固定在手指末端和手臂上,穿戴在手背上,向致动器内充气、加压,即可实现手指与致动器的同步弯曲功能。实验结果表明通过合理的尺寸、结构设计即可实现致动器的大角度弯曲并提供足够大的力带动手指弯曲,达到康复训练的效果。
相比于气体控制,液体驱动则更易于实现较高的压力控制,开发出手套的辅助运动能力。2015年Walsh对康复手套进行了另一思路的设计,提出了一种液压控制的康复手套,如图2所示。

图2 液压控制康复手套
由于该致动器内部具有更大的压力,制造时在弹性材料内部加入了纤维材料进行增强,限制其径向膨胀及主轴方向的延展促进弯曲。采用与气动手套类似的方法将其固定,通过便携式腰带包进行控制,可以实现手指和拇指的运动进而实现较大力量的抓握功能。评估结果表明,该手套可实现更为精确的运动,达到更高的运动辅助功效。
运动辅助设备
相比于基于康复训练的手部康复手套,用于腿部的可穿戴机器人则更具有辅助运动的实用性。Eugene C. Goldfield从生态学角度出发开发了一套称为“第二皮肤”的装置,该装置由嵌入式软气动肌肉和应变传感器组成,通过橡胶材料包装而形成分层的复合结构。“第二皮肤”的设计含有16个气动人工肌肉,将其按4*4的方法排列在圆筒形橡胶上,每个气动人工肌肉配备了一个超弹性应变传感器,用一个微控制器控制四个传感器执行器单元作为一个模块,如图3所示。将橡胶圆筒固定在关节处,通过装置的模块化控制,实现气动人工肌肉的协同工作,使装置实现各种形状的变化并提供足够的力协助运动。
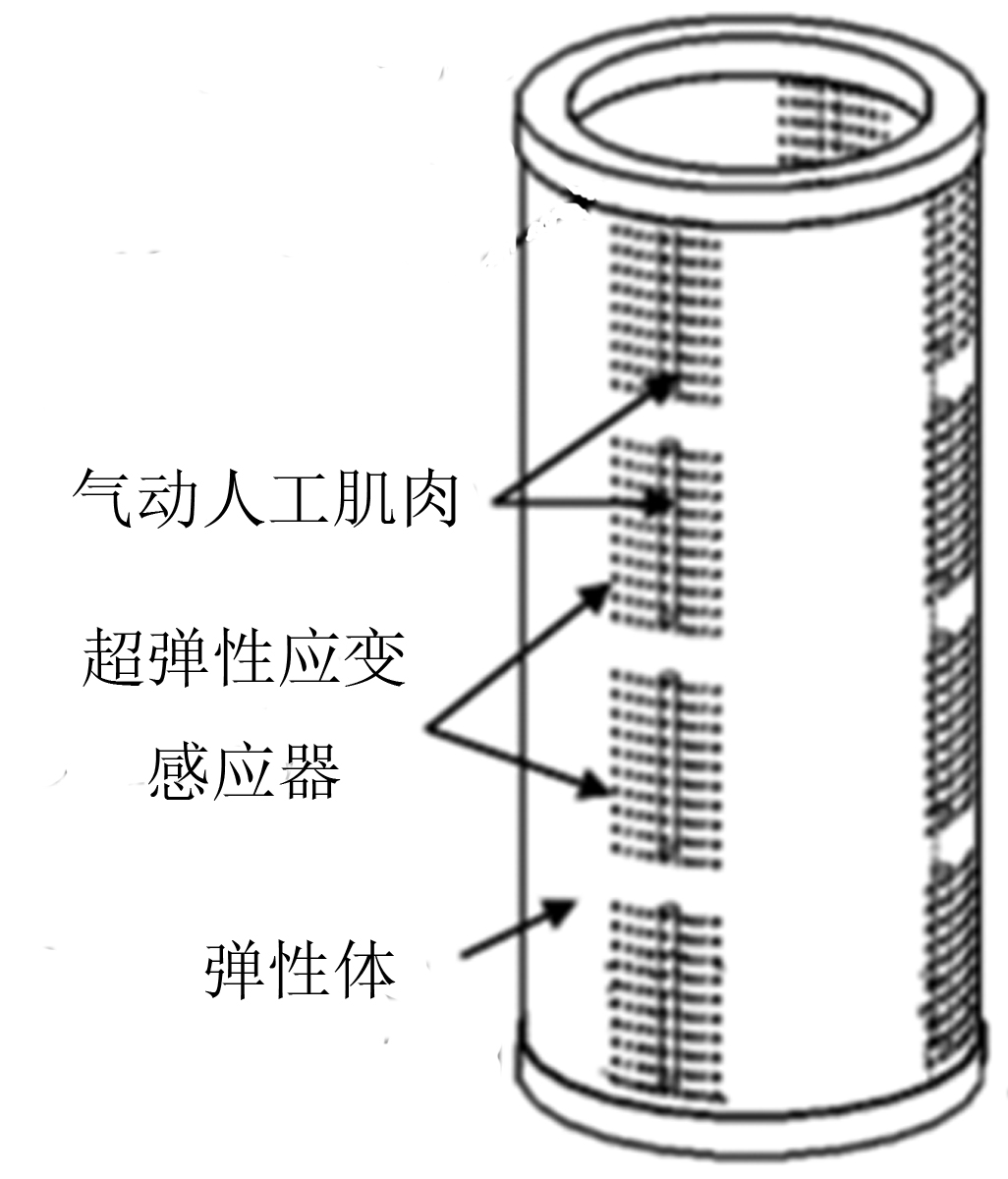
图3 “第二皮肤”结构设计图
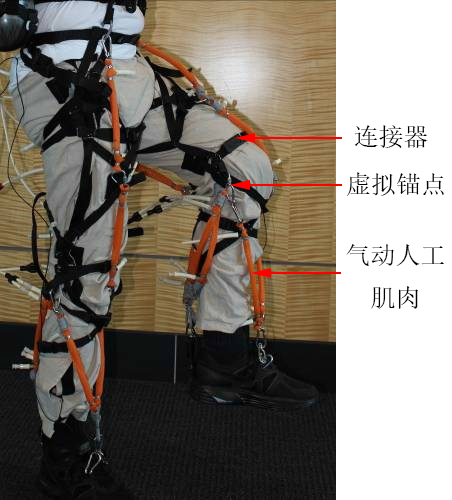
图4 下肢机器人穿戴效果图
与之类似,AT Asbeck对运动辅助设备提出了三个要求:(1)用户能够自主控制自己的步态;(2)对自然步态没有运动学的改变;(3)在行走时为下半身提供辅助。基于上述要求设计出了一种轻便的软下肢机器人,该装置的致动器是McKibben,驱动空气由压缩机供给,经电磁阀控制、分配到各个执行器中。在穿戴时,将连接器和气动人工肌肉的端部连接到虚拟锚点,通过致动器的形变产生力,对关节处施加辅助扭矩来增强人体的正常肌肉功能,协助完成各种形式的人体运动和相关活动。
器官辅助医疗
软体机器人除了作为体外可穿戴设备辅助人体运动,还可以利用其自身的柔软和高弹性来模拟人体内部器官甚至辅助器官运动实现其应有的功能。
F. J. Chen设计了一个模拟吞咽机器人来观察吞咽的食物和饮料的流变学特性,为吞咽困难的患者选择合适的食物。该机器人通过调节不同层被泵入充气室内的压缩空气压力,来调节管道的闭合和波传播的速度模拟人体食管蠕动,如图5所示。
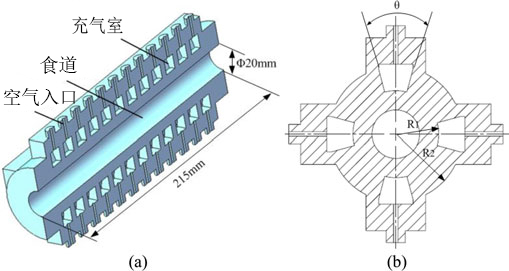
图5 致动器设计方案:(a)剖视图,沿食道可见12个充气室 (b)横截面视图
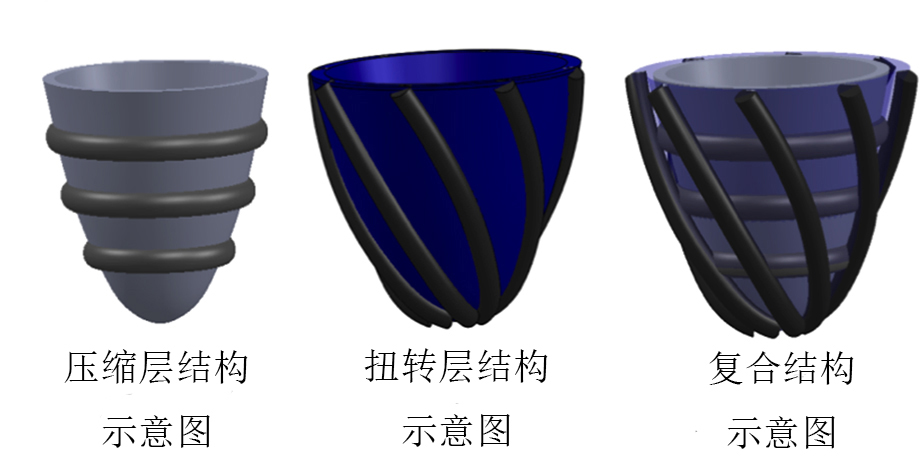
图6 “外套”结构示意图
Ellen T. Roche设计了一个心脏的“外套”“用于辅助心脏跳动。该装置对心脏心肌外两层肌肉纤维取向进行仿生设计使得软制动器可以实现压缩、扭转或两者组合的运动及其逆运动,通过控制系统实现“外套”与心脏的同步运动并根据需要对心脏进行加压,如图6所示。
实验表明,用具有生物相容性材料制成的上述“外套”可帮助急性衰竭的猪心脏提供足够的血液输出。
发展趋势
近年来随着人们对软体机器人的重视与投入,对软体机器人的研究已经取得了一定的成果。但是软体机器人作为一个新兴事物,其研究仍处于起步阶段。
软体机器人相对于传统的刚性机器人来说是极具颠覆性的,其中一个重要的特点就是软体机器人具有无限多自由度,有高度的灵活性能够在非结构化环境中工作。为提高装置的自由度数目就需要有与之相适应的执行器。对于其制造方面,需要对材料有更加深入的了解并寻求新的有效的活性软材料,利用先进的制造技术实现其特殊结构或特定功能。从控制方面来看,需进一步提高其与环境交互能力,降低反应滞后,实现精确实时控制。
从整体上看,在提高执行器性能的同时注意辅助机构尤其是传感器和控制系统的升级更新。对于整体结构的建模和设计往往需要在机械,电气,材料科学甚至生物工程等不同领域进行综合分析,在此基础上生成一套行之有效的控制方法对整套装置进行综合调控。另外,软体机器人整体刚度较小,还无法实现大型、远距离、空间运动的制造和控制。而与之相反,可以在保证性能的基础上,缩小动力源(空气压缩机、水泵等)体积,使整套装置成为便携式产品。
软体机器人的发展推动了学科交叉与技术融合,反过来后者也推动着前者更深层次的应用。而今,部分软体机器人已经作为治疗设备投入应用,作为器官模拟设备用于辅助医疗也在发展当中。
来源:医用塑料;作者:陈志佳, 张冰(北京化工大学;机电工程学院)


